NTTドコモビジネス株式会社
NTTアドバンステクノロジ株式会社
株式会社NTTデータ経営研究所
スタンレー電気株式会社
株式会社東海理化
ドコモ・テクノロジ株式会社
相鉄バス株式会社
先進モビリティ株式会社
NTTドコモビジネス株式会社(旧 NTTコミュニケーションズ株式会社、以下 NTTドコモビジネス)を代表機関としたコンソーシアム8社※1、2つの協力機関※2、および横浜市は、自動運転バスの走行に関する実証実験(以下 本実証)を2026年1月17日から1月22日まで実施します。本実証では、都市部で深刻化するバス運転者不足や休日の交通混雑・渋滞、また狭あい道路や見通不良箇所での対向車両同士が安全にすれ違うための走行調整(離合制御)などの課題に対し、通信制御技術と路車協調技術※3を組み合わせた新たな自動運転モデルの構築を目的としています。
本実証は、総務省の令和6年度補正予算「地域社会DX推進パッケージ事業(自動運転レベル4検証タイプ)」※4(以下 実証事業)の採択をうけ、実施します。
1. 背景と目的
全国的にバス運転者不足や路線縮小が進行する中、横浜市内でも交通サービス維持が課題となっています。
また、よこはま動物園ズーラシア周辺では、休日の来園者による交通渋滞や入庫待ち車列が発生し、安全で効率的なバス運行を支える新たな交通モデルが求められています。
こうした背景を踏まえ、NTTドコモビジネスおよび関係各社は、通信制御(無線リソース最適化)と路車協調(ローカル5G・路側インフラ連携)を融合し、「都市部における混雑発生地域や見通しの悪い狭あい道路でも安定して運行できる自動運転レベル4」の社会実装を目的とした検証を行います。
2. 本実証の概要と検証内容について
本実証は、総務省令和5年度補正予算「地域デジタル基盤活用推進事業(自動運転レベル4検証タイプ)」に採択され、昨年度実施した「よこはま動物園ズーラシア周辺での自動運転実証実験」を踏まえた実証となります。
昨年度は、同園周辺往復約2km区間で小型自動運転車による通信切替制御と走行安全性を中心に検証しましたが、今年度は走行車両を2台にし、さらに実証走行区間を相鉄本線鶴ケ峰駅からよこはま動物園北門までの往復約10.6kmに拡大します。
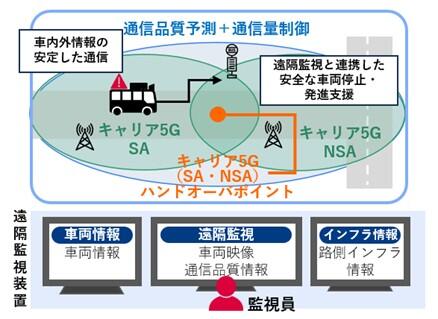
(1)走行中でも大容量データを安定して送受信できる通信環境の構築を実現
無線リソース最適化による車内遠隔監視の実現
Cradio※5による無線通信電波品質予測とハンドオーバー制御で通信切断や劣化を最小限に抑え、ISAP※6による通信量制御で映像遅延や画質劣化を抑えます。また、5Gワイド※7やネットワークスライシング※8などの無線リソース最適化技術を適用し、都市部の変動する通信環境下でも車両制御に必要な情報を安定的に伝送できることを確認します。監視員負担を考慮した効率的な運用の実現
docomo MEC®(以下MEC)※9上および遠隔監視装置でのリアルタイム映像処理により、バス車内の状況を統合監視し、1名の監視員で2台の車両を同時に遠隔監視可能な体制(1:2遠隔監視)を構築します。これにより、監視業務の省人化・効率化を図るとともに、将来的な複数車両同時運行モデルの実現性を検証します。
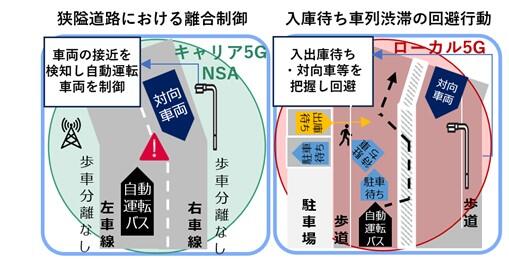
(2)狭あい道路や見通し不良区間における、安全かつ円滑な自動運転走行を支援する通信・制御基盤の構築を実現
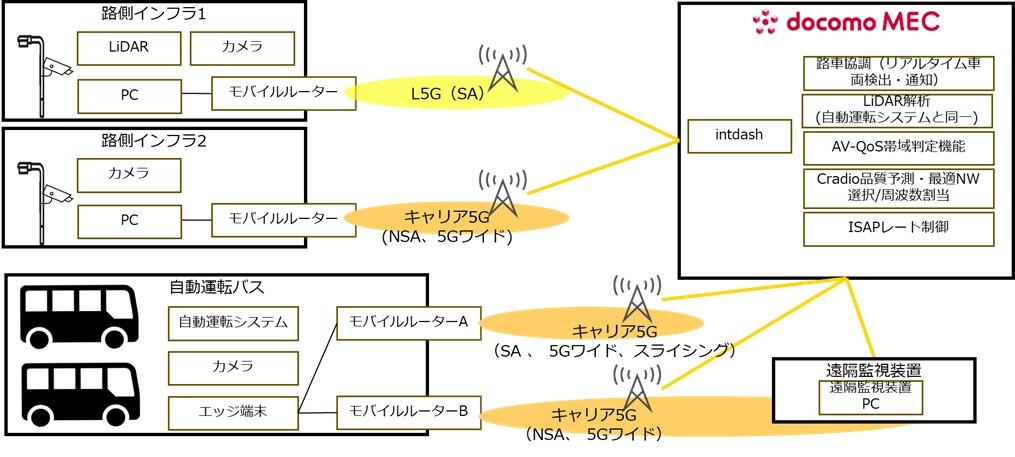
ローカル5Gサービス TypeD※10(以下 ローカル5G)とキャリア5Gを併用し、車両と路側インフラ(LiDAR※11・カメラ・スマート道路灯)との間で双方向通信を行います。これらのセンサー情報をMEC上で統合・リアルタイム処理し、自動停止・減速・離合判断を車両制御に反映させることで、見通不良区間や狭い区間での安全通行を可能にします。また見通不良の交差点や駐車場出入口における他車を即時に把握し、他車を回避する通行を可能にします。
昨年度は、通信品質の可視化や映像伝送の安定化を中心に検証を行いましたが、本年度は路側インフラ連携・車両間通信の統合制御にまで発展させ、都市部での自動運転における路車協調制御技術の有効性を明らかにします。
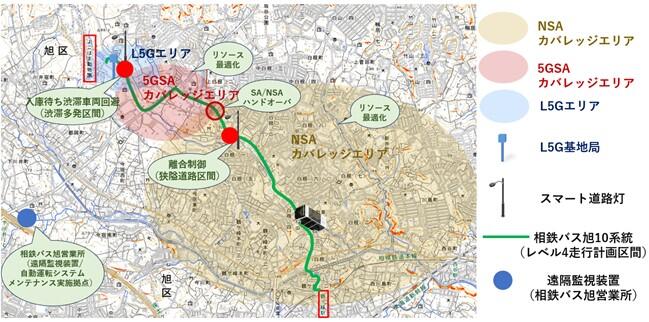
| 実証場所 | 神奈川県横浜市 相鉄本線鶴ケ峰駅~よこはま動物園北門(片道約5.3km) |
|---|---|
| 運行期間 | 2026年 1/17~1/22(土日含む) <一般試乗日は1/17、1/18、1/21、1/22の4日間となります> |
| 自動運転車両 | ・自動運転レベル2 日野自動車「ポンチョ」(試乗定員10名)2台 |
| 乗車場所 | 相鉄本線鶴ケ峰駅バスターミナル9番乗り場 相鉄本線鶴ケ峰駅バスターミナル~よこはま動物園→よこはま動物園北門(乗降なし)→相鉄本線鶴ケ峰駅バスターミナル |
| 運行区間 | 相鉄本線鶴ケ峰駅~よこはま動物園ズーラシア |
| 乗車方法 | 試乗専用乗車予約サイトからの事前予約制(乗車便により定員が異なります) 【往路:鶴ケ峰駅発→よこはま動物園着】 https://coubic.com/952e4759114ee1b8a52e/1605725 【復路:よこはま動物園発→鶴ケ峰駅着】 https://coubic.com/952e4759114ee1b8a52e/1880389 ・時刻表については、事前にご案内する情報をご参照ください。 ・天候などの影響により手動運転への切り替えもしくは運休する場合があります。 |
| 運賃 | 無料 |
| 遠隔監視システム設置場所 | 相鉄バス株式会社 旭営業所 |
| その他 | 当日の天候などによりご乗車いただけない場合がありますので、ご留意ください。 |

本実証における各社の役割および使用する技術要素と構成においては、別紙をご参照ください。
3. 今後の展開
本実証を通じて、都市部における自動運転バス運行の安定化・効率化に必要な通信制御および路車協調技術の有効性、および安全安心な監視業務のオペレーションを検証します。得られた知見は横浜市のみならず、同様の交通課題を抱える他都市においても活用可能な知見として整理し、全国各地の都市型自動運転モデルの社会実装に向けて展開を図ります。
また、ローカル5G・Cradio・ISAP・MEC・5Gワイド・ネットワークスライシングといった先端通信基盤技術の活用は、将来の商用自動運転サービスに不可欠な技術要素であり、2027年度までに想定される全国展開フェーズに向けた重要な検証ステップと位置づけています。これらの通信・制御技術を統合的に運用することで、遠隔監視・安全制御・データ利活用を一体化した持続可能な運行モデルの構築を目指します。
1:コンソーシアム8社とは、NTTドコモビジネス株式会社、NTTアドバンステクノロジ株式会社、株式会社NTTデータ経営研究所、スタンレー電気株式会社、株式会社東海理化、ドコモ・テクノロジ株式会社、相鉄バス株式会社、先進モビリティ株式会社を指します。
2:2つの協力機関とは、NTTアクセスサービスシステム研究所、NTTネットワークサービスシステム研究所を指します。
3:路車協調技術とは、道路側(路側)に設置されたセンサーやカメラなどのインフラと、自動車(車)のシステムが通信で連携し、安全で円滑な自動運転や交通を実現するためのシステムです。
4:総務省令和6年度補正予算「地域社会DX推進パッケージ事業(自動運転レベル4検証タイプ)」の選定結果については下記をご参照ください。
https://www.soumu.go.jp/menu_news/s-news/01ryutsu06_02000431.html
5:Cradioとは、NTTが研究開発している「マルチ無線プロアクティブ制御技術」の総称です。複数の無線ネットワークを連携させ、ユーザーが無線環境の変化を意識することなく、最適な通信を維持できる、自然で安定した通信環境を実現することを目指す技術群です。
6:ISAPとは、NTTが推進する6G時代の通信・コンピューティング基盤技術です。ネットワーク内で情報処理を分散・連携させ、端末とクラウドの間で高速かつ効率的なサービス連携を実現します。
7:5G ワイドとは、NTTドコモビジネスが提供する混雑エリアや時間帯においても安定した通信の維持および、通信速度の向上がはかれるモバイルネットワークサービスです。詳細は以下のサイトをご参照ください。
https://www.ntt.com/business/services/5gwide.html
8:ネットワークスライシングとは、物理ネットワークを仮想的に分割(スライシング)し幅広いニーズに対応する技術です。本実証では4G用のコア装置と5G基地局を組み合わせて通信する従来のNSA(ノン・スタンドアローン)方式とは異なりコア装置、基地局を含めて、5Gの新しい技術に刷新するSA(スタンドアローン)方式を用いて、4Gを経由せずにダイレクトに5Gネットワークが利用できるようになります。これにより、通信をスタートさせるまでの時間が短縮され、広帯域な周波数帯を組み合わせた柔軟な通信が可能になり、通信速度を大幅に高速化できる特長があります。
9:docomo MECとは、データ処理をクラウドではなく通信網の近くで行うことで、通信遅延を低減し、セキュリティも高められるドコモのエッジ型プラットフォームです。
docomo MEC® | 低遅延・高セキュアなドコモの法人向けクラウドコンピューティング
10:ローカル5Gサービス TypeDとは、NTTドコモのキャリア設備を共用することで、ローカル5Gネットワークを低コスト、省スペース、かつ高い保守性・冗長性で構築できる、NTTドコモビジネスのサービスです。ユーザーが設置するのは無線装置(RU)とアンテナのみで、コアネットワークの設備は共用となるため、従来のローカル5G導入におけるコストや運用のハードルを下げています
11:LiDAR(Light Detection and Ranging)は、レーザー光を使って対象物までの距離や形状を正確に計測するセンサー技術です。
「docomo MEC」は、株式会社NTTドコモの登録商用です。
関連リンク
別紙
実証実験での各社の役割および使用する技術要素と構成
本実証実験は、総務省の令和6年度補正予算「地域社会DX推進パッケージ事業(自動運転レベル4検証タイプ)」に採択された、NTTドコモビジネス株式会社を代表機関とした8社で構成されるコンソーシアム、および2つの協力機関で実施します。本実証での各社の役割と使用する技術要素・構成は以下の通りです。
1. 各社の役割と技術要素
| NTTドコモビジネス | ・実証実験全体の計画策定、全体管理 ・実現方式の検討および全体ネットワーク構成の設計・構築 ・5Gワイド、ネットワークスライシング、docomo MECを活用した安定的かつセキュアに接続する閉域ネットワークの設計・構築・運用 ・ローカル5G基地局の設計・構築・運用 ・intdash※1 を使用した自動運転バスの遠隔監視システムの設計、構築、提供 ・遠隔監視員視点での「監視映像およびバスの走行品質」、並びに、複数台同時監視における「監視業務の質」に関する調査 ・路車協調に向けた映像AIによるリアルタイム車両検出・通知システムの設計・構築・検証 |
|---|---|
| NTTアドバンステクノロジ株式会社 | ・ネットワーク設計支援およびCradioシステムの構築、運用 ・Cradioによる無線通信品質予測・最適化制御、および無線通信検証/評価 |
| 株式会社NTTデータ経営研究所 | ・社会受容性評価、運行採算性評価、実装ロードマップ策定支援 |
| スタンレー電気株式会社 | ・路側インフラ(スマート道路灯)の設計・構築・運用 ・路側センシングデータのMEC連携 |
| 株式会社東海理化 | ・自動運転バスの遠隔監視システム/緊急通話インタフェースの構築、設置、提供 |
| ドコモ・テクノロジ株式会社 | ・ローカル5G基地局の環境構築 ・高品質無線通信ネットワーク全体制御の設計・運用 ・ローカル5G・スライシング等の通信品質評価 |
| 相鉄バス株式会社 | ・運行区間でのバスの運行に関する知識の提供 ・自動運転バスの運行に関わる各種計画・運行・管理 ・自動運転バスの運行における運行管理業務、および遠隔監視に関する知識の提供 |
| 先進モビリティ株式会社 | ・自動運転システムの提供、車載機器設定、遠隔監視連携API調整 ・走行制御ログ収集・評価 ・運行区間でのバス走行に必要な調律作業 ・バスドライバーへの車両操作トレーニングの実施 |
| 【協力機関】 NTTアクセスサービスシステム研究所 | ・複数無線エリアの伝搬推定および設計技術・品質予測技術の活用支援 |
| 【協力機関】 NTTネットワークサービスシステム研究所 | ・ネットワーク融合サービス高速処理基盤(ISAP)の活用支援。無線状態と連動したデータ送受信レート制御により、自動運転バスの管制に必要な映像伝送の品質を確保 |
2. 車載カメラによる遠隔管制および道路灯カメラによる路側情報連携の実施について
本実証では、自動運転バス車両に搭載したカメラおよび道路灯カメラから映像データを取得し、自動運転車の安心安全な走行実現に貢献する目的で利用します。車載カメラからの映像データは、自動運転車両が置かれている状況などを遠隔からリアルタイムに把握する為に使用されるものであり、また、道路灯からの映像データは、路側の状況を把握するために使用されているものであり、通行している車両や市民の皆さまを特定するものではありません。カメラで撮影されたリアルタイム映像データは実証企業関係者のみ立ち入り可能な遠隔管制室等の居室内でのみ取り扱い、実証完了後は速やかにデータを削除します。
本実証では個人情報の保護に関する法律、同法の政令や規則及び同法のガイドラインなどの遵守のための基本方針を策定し、データの取得・利用・保存などを行う場合の基本的な取り扱い方法を整備しています。整備した取り扱い方法に従って、データが取り扱われていることを責任者が確認。カメラなどデータを取り扱う機器や電子媒体の盗難などを防止するための措置を講じるとともに、不正なアクセスや不正なソフトウェアから保護する仕組みを導入しています。
1:intdashとは、株式会社アプトポッドが提供するデータ転送ミドルウェアです。車両やロボットなどの高頻度・大容量の時系列データのハイパフォーマンスなデータ伝送および、複数センサーのデータの統合管理を行います。